
SONCAT (The Sonar Calibration And Training buoy) is Scanmatic’s trademark for a portable buoy-based system for testing and calibrating naval ship sonar, as well as training sonar operators. The SONCAT system simulates sound from an underwater target, typically a submarine. The system consists of mainly two parts:
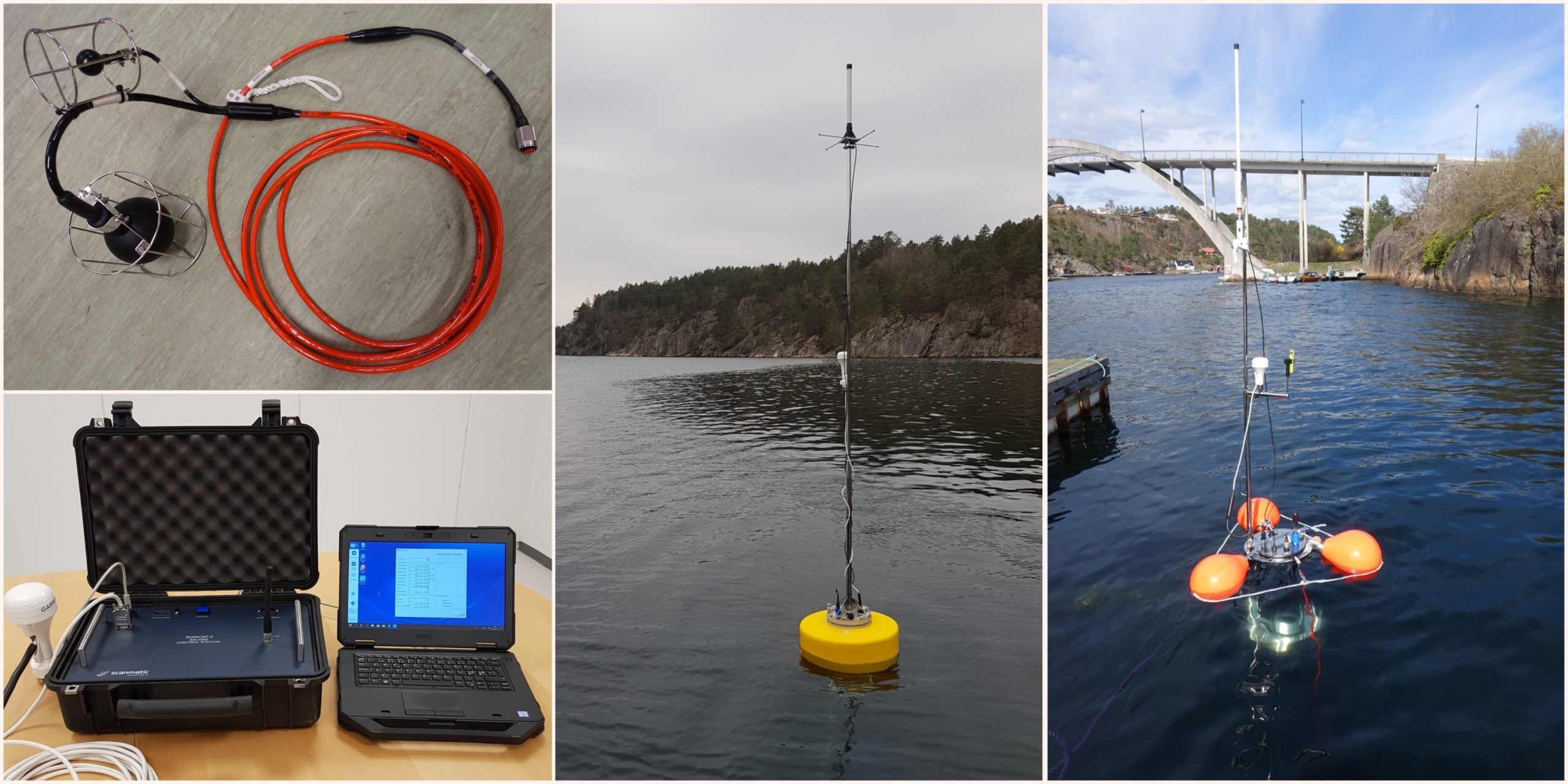
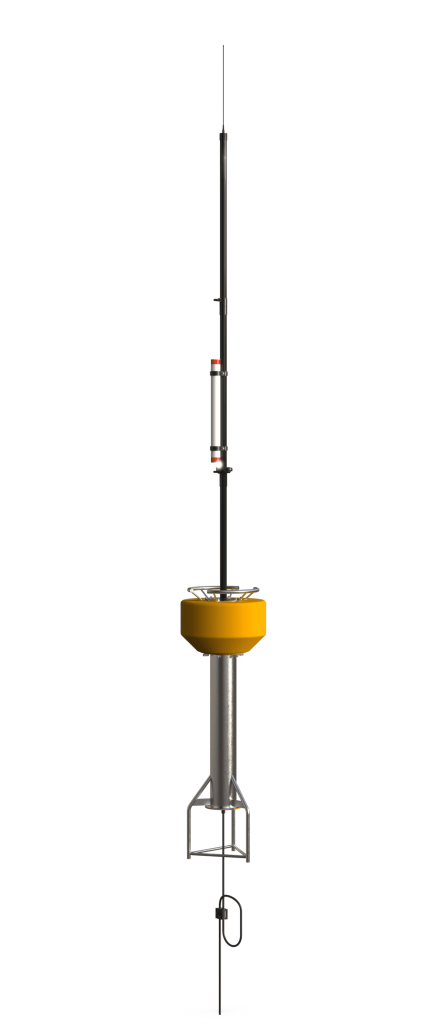
- SONCAT buoy: a battery-powered buoy that floats freely in the sea and contains all the necessary electronics to simulate an underwater target (e.g. submarine), as well as hydrophone («underwater microphone») and one or more transducers («underwater speaker»). At the top of the buoy is an antenna rack for the radio communication with the control station, as well as a GPS for logging position/distance.
- SONCAT control station: to control and monitor the operations of the SONCAT buoy, typically from a naval ship or stationary control building. The control station consists of:
- A Pelicase case containing all the necessary electronics to communicate with the SONCAT buoy from ship/land, including radio and a GPS for distance assessment to the SONCAT buoy in the sea. The control station is battery operated.
- PC with a user interface to control and monitor the operations of the buoy, which connects directly to the control station.
The SONCAT system different modes for active and passive sonar testing.
- Active sonar test mode (echo repeat and store-repeater mode): The SONCAT buoy will return an acoustic echo for received sonar pulses in the water, but with an operator-selected very accurate time delay on the reflected signal. This time delay simulates the distance between the naval ship sonar and the underwater target (submarine). In addition, the operator can modify the reflected signal with additional effects such as Doppler shift, modified target strength and add highlights. The Doppler shift simulates that the underwater target moves at a certain speed, while highlights simulate variations in the physical shape of the underwater target.
- Passive sonar test mode: in this mode, the SONCAT buoy emits sound in the water from an audio file. This will typically be sound simulating propeller noise, or other signature noise from a naval vessel, or a sonar pulse at a fixed repetition interval. The audio file can contain any waveform, for instance a music file.
The first SONCAT buoy was delivered in 2006, and since then there have been several deliveries. In 2018, Scanmatic for the first time delivered new SONCAT-2, a completely redesigned and modernized version of SONCAT. SONCAT-2 was developed for- and in collaboration with FFI, with support from Innovation Norway.
The new generation SONCAT buoy contains the all-new Sonar3 electronics, which is Scanmatic’s latest generation state-of-the-art processing and DSP unit for sonar products. Sonar3 offers new possibilities for real-time digital signal processing (DSP), and has a sound quality that has been improved many times, through faster digital sampling rate and better audio resolution (bit-depth). The platform is Linux based and FPGA is a central part of the signal processing.
Unlike the first generation SONCAT, the second generation SONCAT is designed to transmit wideband audio of any waveform in the frequency range 1 – 40 kHz, like signature noise or even regular music in the water! To achieve this, the SONCAT-2 transducer consists of 4 transducers, each covering a sub-specter of the total frequency band.
In addition to brand new electronics, the SONCAT-2 has been given a “face-lift” with new redesigned mechanics.
Scanmatic can adapt SONCAT to the customer’s needs. Typical variations may be usable frequency range, minimum output source level, type of radio communication, mechanical properties and more.
SONCAT-3. The new standard SONCAT.
