
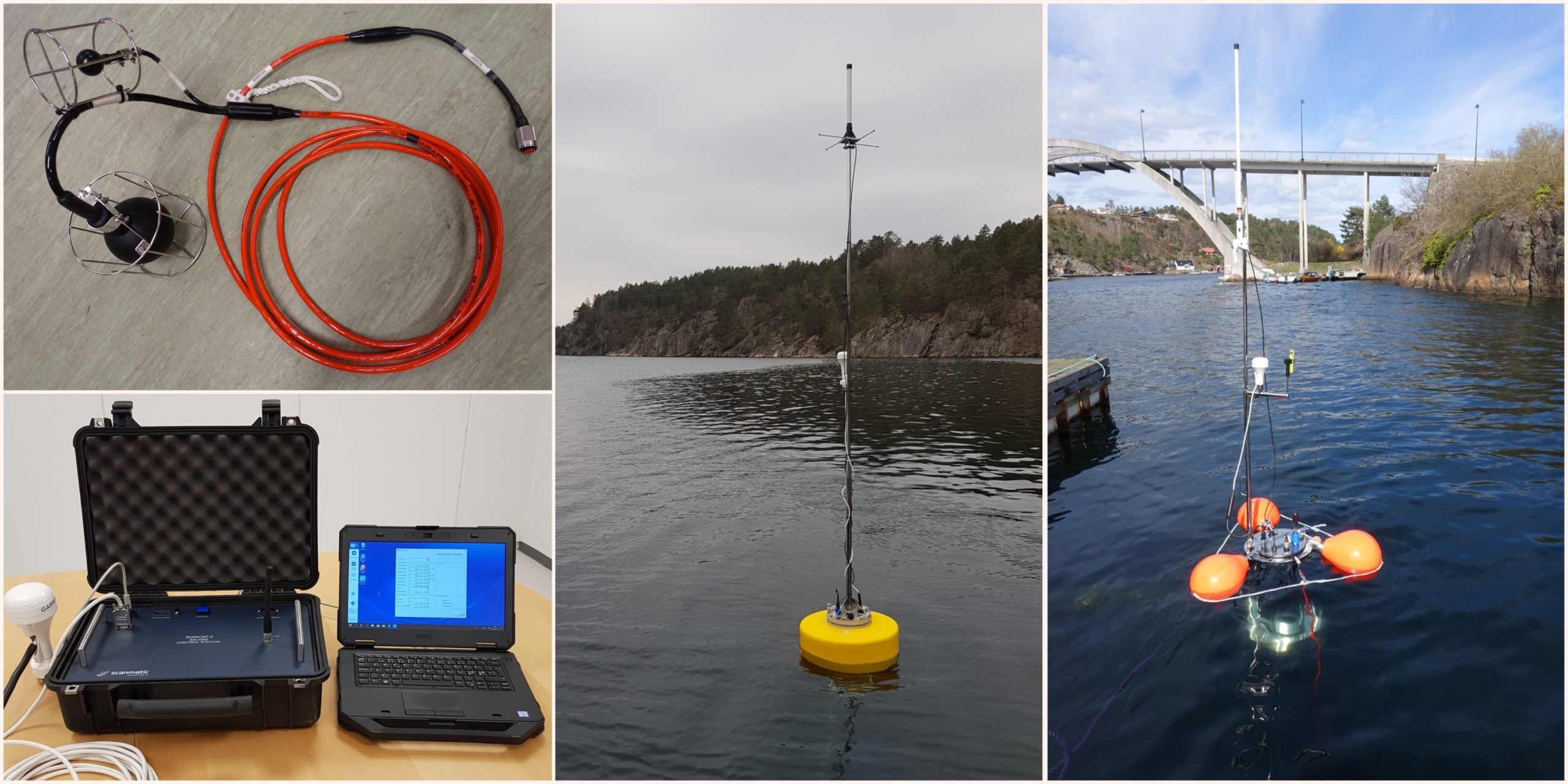
SONCAT (The Sonar Calibration And Training booy) är Scanmatics varumärke för ett bärbart och bojbaserat system för testning och kalibrering av ekolod på marina fartyg, samt utbildning av ekolodsoperatörer. SONCAT-systemet simulerar ljud från ett undervattensmål, vanligtvis en ubåt. Systemet består huvudsakligen av två delar:
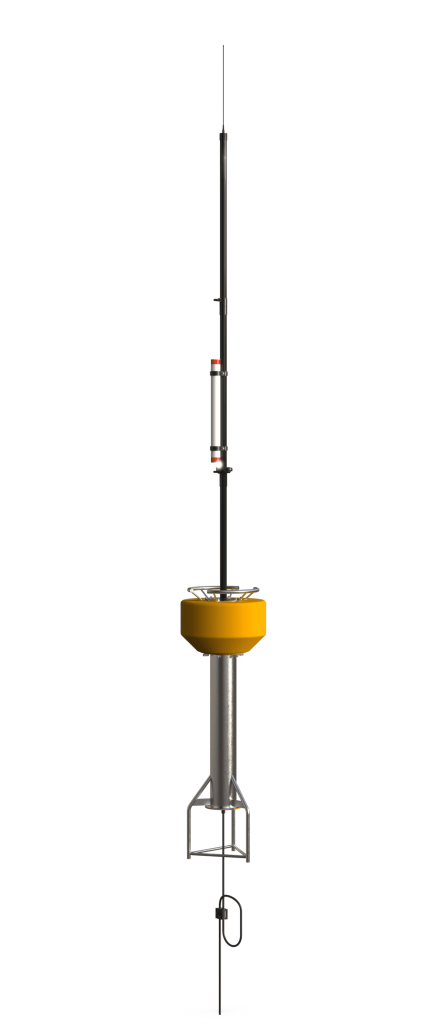
- SONCAT-boj: en batteridriven boj som flyter fritt i havet, och som innehåller all elektronik som behövs för att simulera ett undervattensmål (t.ex. ubåt), samt en hydrofon (”undervattensmikrofon”) och en eller flera givare (”undervattens” högtalare”). Överst på bojen finns ett antennställ som innehåller minst en radio för kommunikation med kontrollstationen, samt en GPS för att logga position/avstånd.
- Kontrollstation: för att styra och övervaka driften av SONCAT-bojen från en båt eller ett kontrolltorn. Kontrollstationen består av:
- ett Pelicase-fodral som innehåller all nödvändig elektronik för att kommunicera med SONCAT-bojen från land/båt, inklusive radio och en GPS för avståndsbedömning till SONCAT-bojen i havet. Kontrollstationen är batteridriven.
- PC med användargränssnitt för att styra och övervaka bojens verksamhet, som är ansluten direkt till kontrollstationen.
SONCAT-systemet har lägen för aktiv och passiv ekolodstestning. För mer detaljerad information om dessa lägen, se den här länken .
- Aktivt ekolodstestläge (echo-repeater och stor-repeater-läge): SONCAT-bojen kommer att skicka ut ljudekon för mottagna ekolodspulser i vattnet, men med en operatörsvald tidsfördröjning på den reflekterade signalen. Denna tidsfördröjning simulerar avståndet mellan ekolodet och undervattensmålet (ubåten). Dessutom kan operatören modifiera den reflekterade signalen med dopplereffekten, variera den reflekterade sändningseffekten och lägga till en dopplereffekt för att simulera att undervattensmålet rör sig med en viss hastighet, medan höjdpunkter simulerar variationer i den fysiska formfaktorn för undervattensytan. mål.
- Passivt ekolodstestläge: i detta läge avger SONCAT-bojen ljud i vattnet från en ljudfil. Detta kommer vanligtvis att simulera propellerbrus eller annat signaturljud från ett fartyg, eller ekolodspulser med ett fast repetitionsintervall. Ljudfilen kan i princip vara vilken musikfil som helst.
Den första SONCAT-bojen levererades 2006 och sedan dess har det skett flera leveranser. Under 2018 levererade Scanmatic för första gången den nya SONCAT-2, som är en helt omdesignad och moderniserad version av SONCAT. SONCAT-2 har utvecklats för och i samarbete med FFI, med stöd från Innovation Norge.
Den nya SONCAT-2-bojen innehåller den helt nya Sonar3 -elektroniken, som är Scanmatics senaste generation av ”state-of-the-art” process- och DSP-enhet för ekolodsprodukter. Sonar3 ger nya möjligheter för digital signalbehandling i realtid (DSP), och har en ljudkvalitet som har förbättrats många gånger, bl.a. genom snabbare digital samplingshastighet och bättre ljudupplösning (bitdjup). Plattformen är Linux-baserad och FPGA är en central del av signalbehandlingen.
Till skillnad från första generationens SONCAT är andra generationens SONCAT designad för att avge bredbandsljud i frekvensområdet 1 – 40 kHz, och kan därför i princip spela vanlig musik i vattnet! För att uppnå detta består omvandlarenheten i SONCAT-2 av 4 givare, som var och en täcker ett delspektrum av det totala frekvensbandet. Förutom helt ny elektronik har SONCAT-2 fått ett ”ansiktslyft” med nydesignad mekanik.
Scanmatic kan anpassa SONCAT efter kundens behov. Typiskt kan variationer vara användbart frekvensområde, lägsta utgångskälla, typ av radiokommunikation, mekaniska egenskaper och mer.
SONCAT-3. Den nya standarden SONCAT.

SONCAT-2 givare array, utgåva för bredbandsakustik.